

Introducing Recon
Recon is a cloud-based Intelligence Preparation of the Operational Environment AI agent that creates decision support products based on Army doctrine. Sign up for the Closed Beta now!

“It starts with the enemy. Paragraph 1 is paragraph 1 for a reason…
understanding the threat enables how we operate, understanding our enemy capabilities, that can be applied to how we can fight as an Army.”
General Gary M. Brito, Commanding General, United States Army TRADOC
Today we’re launching a Closed Beta of Recon: a cloud-based Intelligence Preparation of the Operational Environment (IPOE) AI agent that creates decision support products like the Modified Combined Obstacle Overlay (MCOO), identifies tactical areas like Position Areas for Artillery (PAA), and generates maneuver and logistics routes based on specific formations (e.g. Stryker Battalion, Mobile Infantry Company, Armor Brigade).
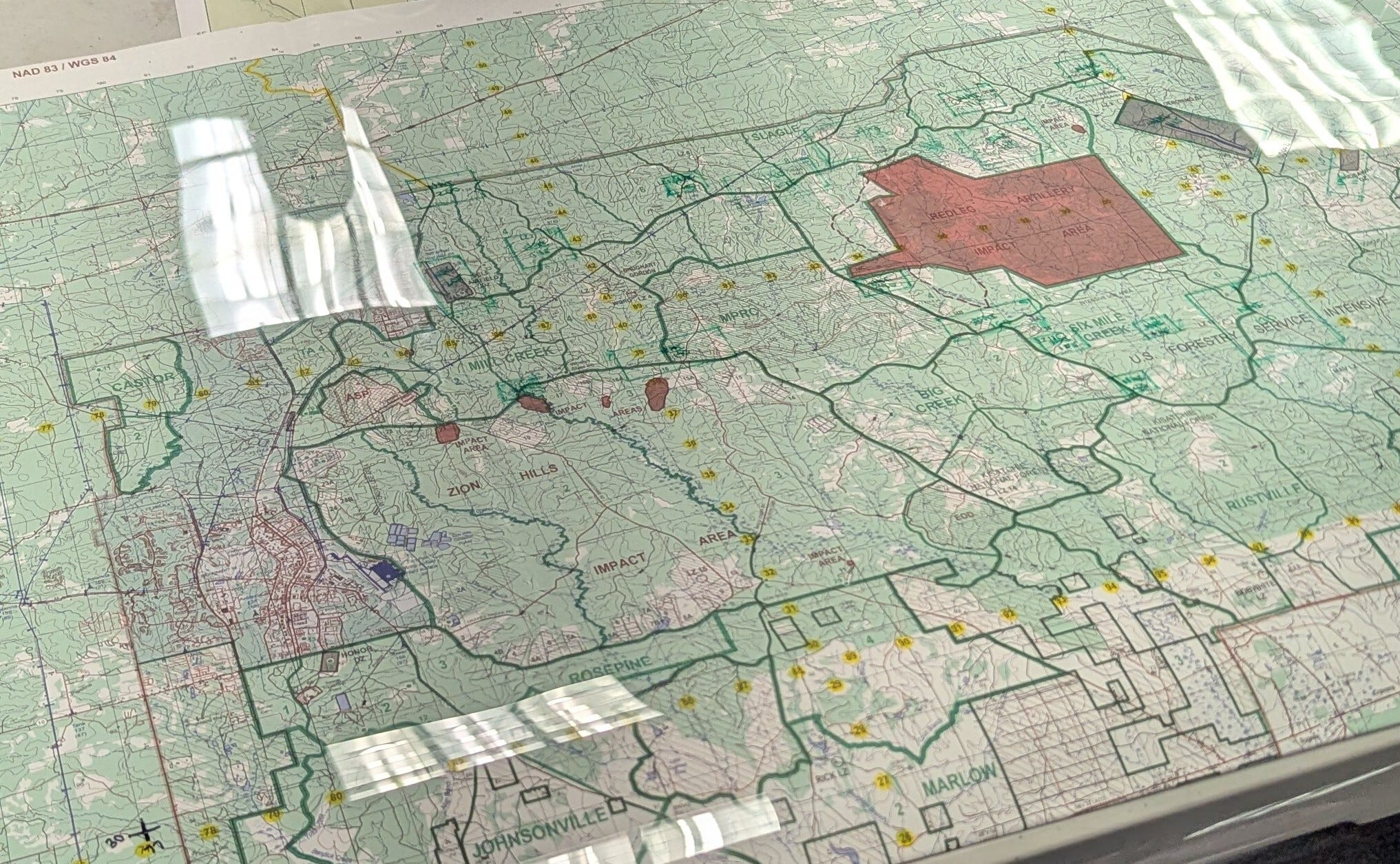
Most Army brigades and subordinate units spend hours manually analyzing the operational environment. Soldiers use standard-issue maps to assess terrain, identify obstacles, and develop overlays like the MCOO.
Recon changes that.
Recon automates time-consuming manual tasks like terrain analysis, PAA selection, and MCOO production in minutes. This allows warfighters to focus on higher-order operational art and applying their creativity and judgment.
Anyone who's served in the military knows what it means to do more with fewer people. As staff sizes shrink from HQDA down to the brigade level, Recon empowers warfighters to maintain effectiveness—even with leaner teams.
Recon can be accessed directly through https://recon.exialabs.com/ or Palantir Foundry. Recon has been integrated with Palantir’s Defense Ontology, which means we've built easy points of integration with other defense-ontology compliant Maven Smart System applications.
How Recon Works
1. MCOO
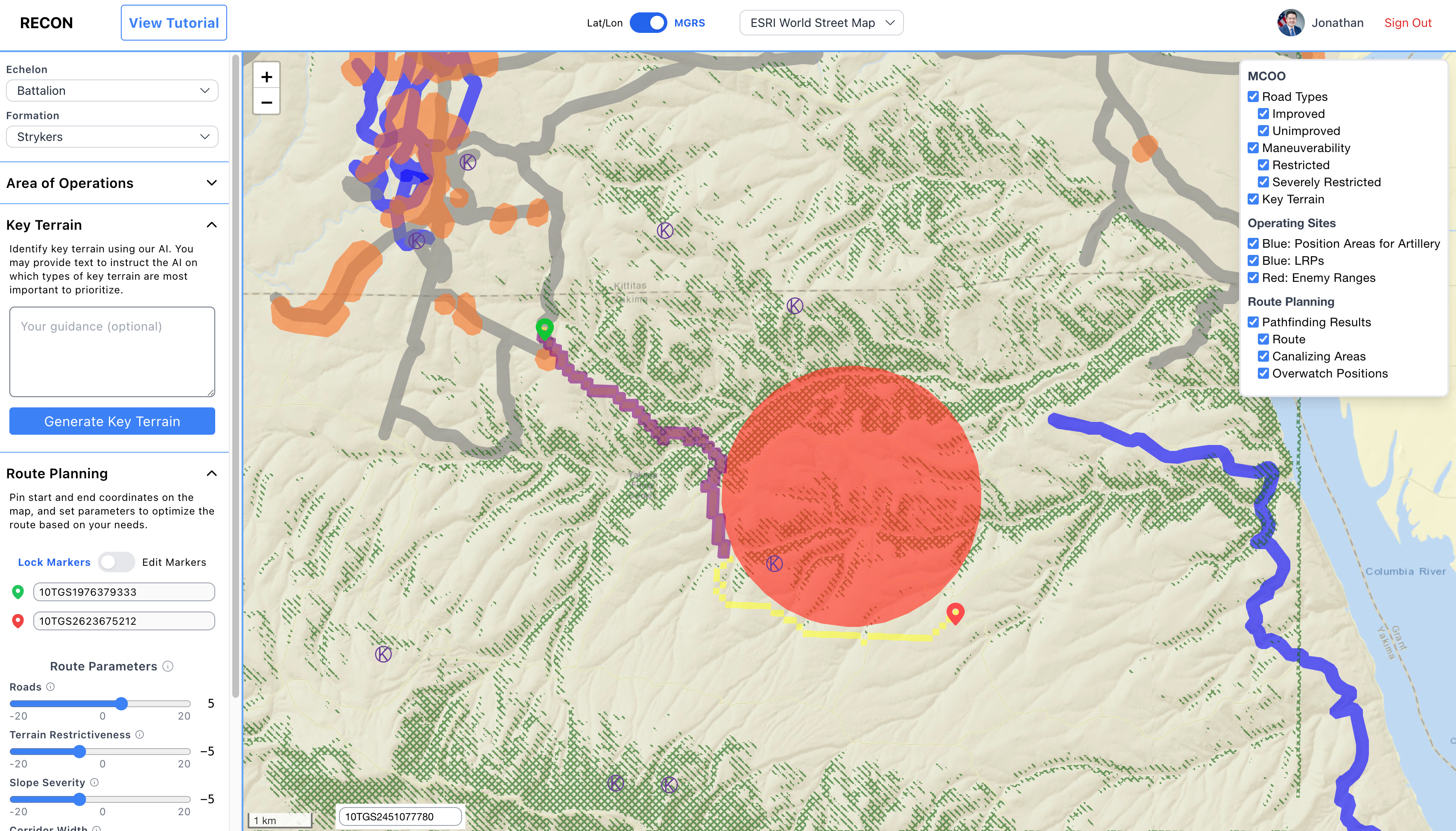
Users select their formation (e.g. Stryker Battalion, Mobile Infantry Company, Armor Brigade, etc.) and then draw a rectangle where Recon will start conducting terrain analysis. In this example, we’ve entered the coordinates for Yakima Training Center.
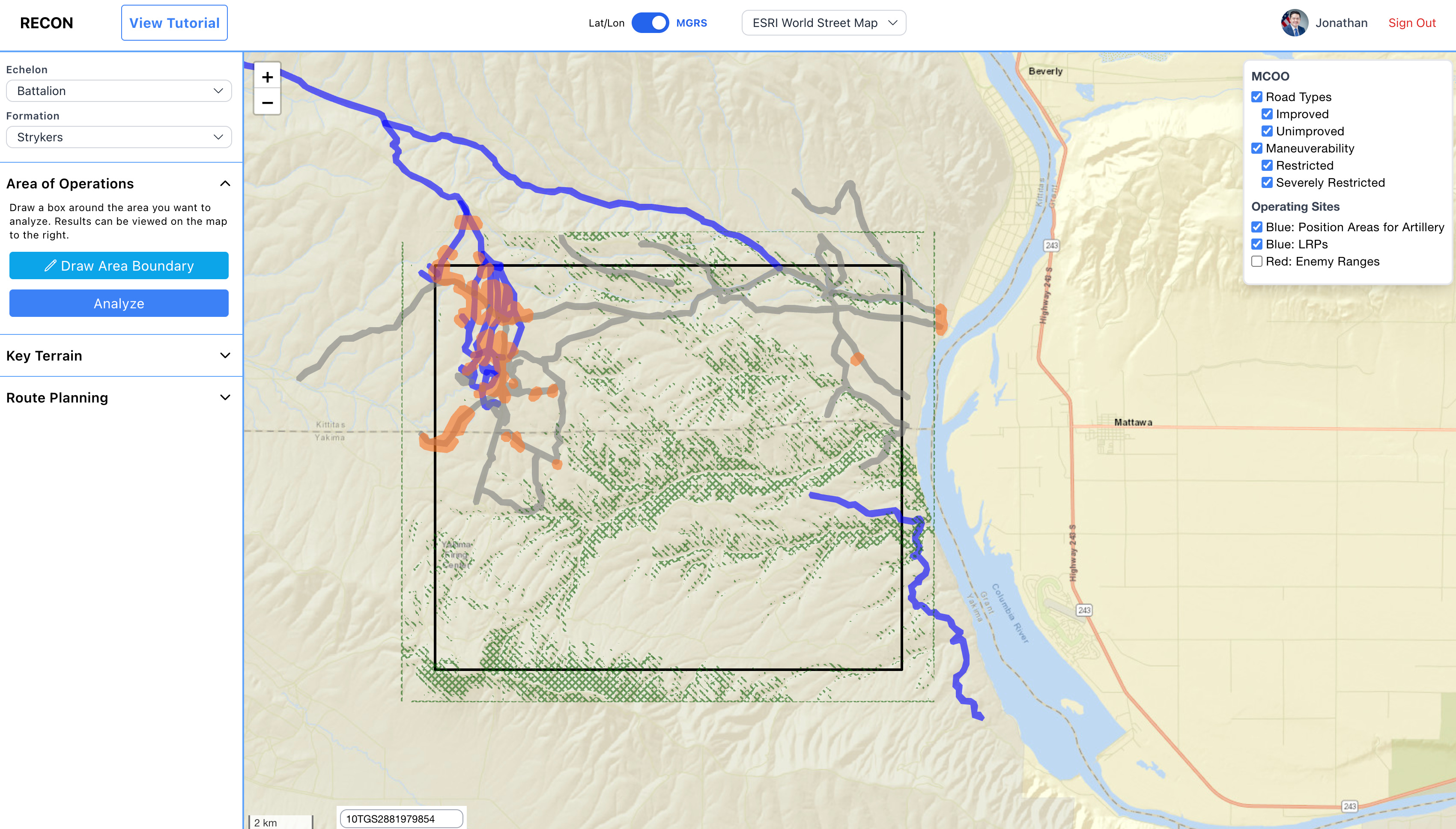
Recon identifies Maneuverability based on Slope and Land Cover and grades areas as Severely Restricted, Restricted, or Unrestricted. We’re gathering more data to enhance maneuverability scoring like Soil Moisture, man made obstacles (such as cuts and fills along a road), natural obstacles (such as escarpments, large boulders / rock formations), hydrological features, steep back slope, and more.
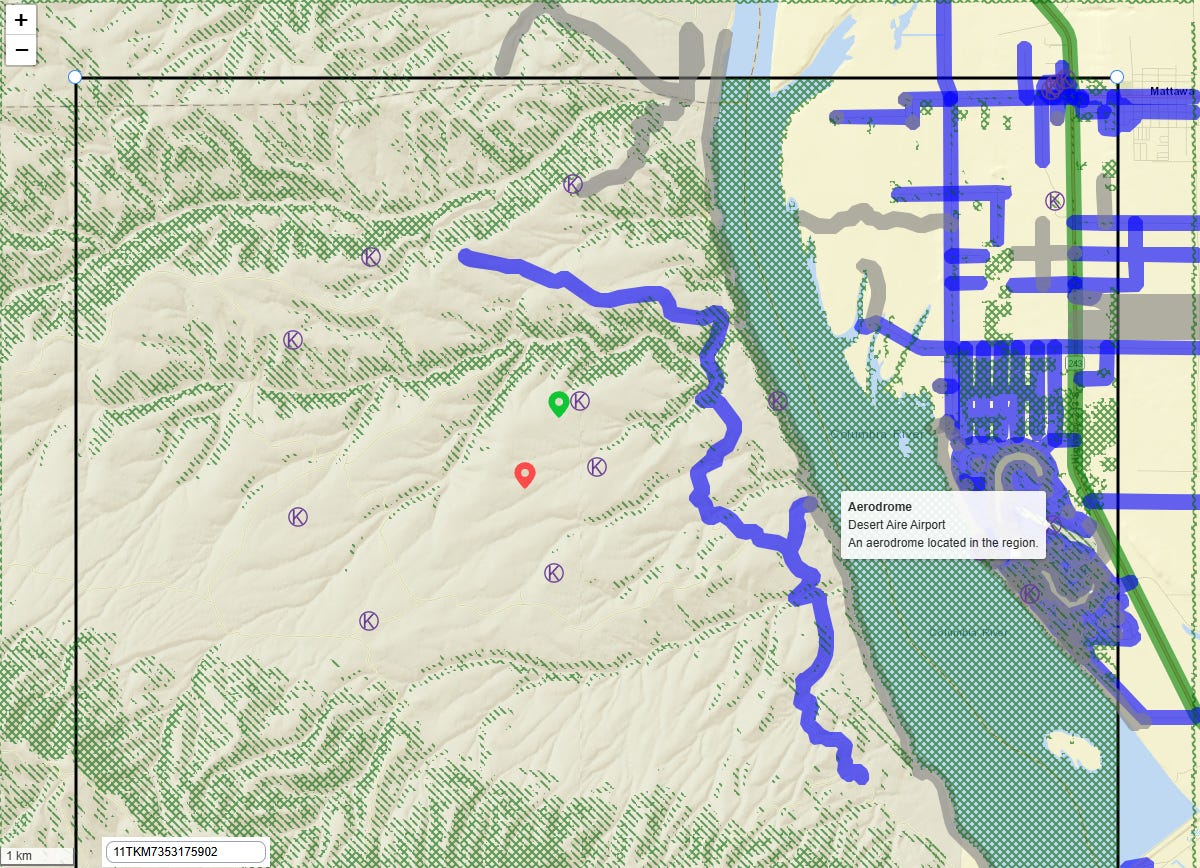
Key terrain is an identifiable characteristic whose seizure or retention affords a marked advantage to either combatant. Recon currently focuses on identifying infrastructure (e.g. airports, bridges) as key terrain. Our backlog includes identifying natural terrain key terrain within the selected analysis area. We also give users the optional ability to direct the key terrain AI agent through prompts in order to fine tune its output.
2. Operational Site Selection
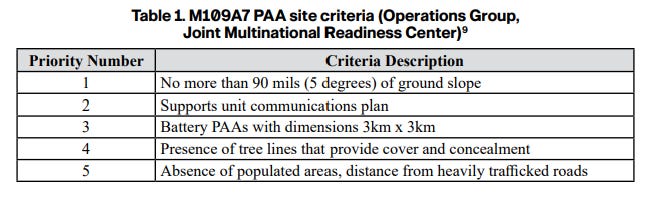
Recon applies analytical methods to identify optimal sites and areas—such as Position Areas for Artillery (PAAs), Logistic Release Points (LRPs), and Helicopter Landing Zones (HLZs)—drawing from doctrinal sources like FM 4-0 Sustainment Operations and operational insights resources such as CALL No. 24-846: PAA Analysis in Severely Restricted Terrain.
3. Route Planning
Recon first identifies roads – the arteries for maneuver, sustainment, and control. Because roads are long and difficult to secure in their entirety, Recon identifies specific segments that are key to control, such as canalizing terrain (specific points where things funnel or are constricted) and natural and man-made obstacles (e.g. rivers and bridges). Then, it identifies overwatch positions to control canalizing terrain and obstacles. In this particular example, Recon is avoiding the range of a notional enemy artillery that was pulled through Palantir.
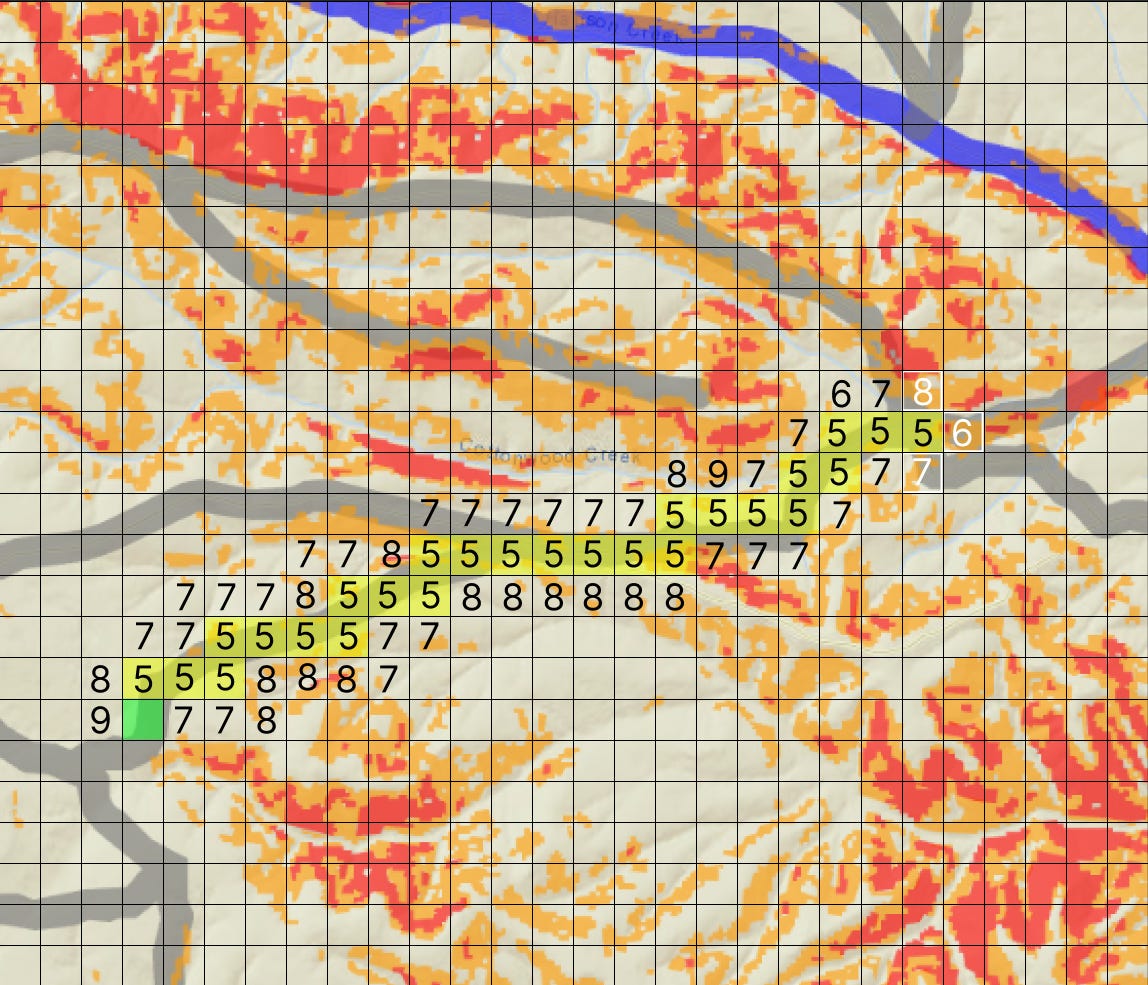
Recon is able to process a large amount of geospatial data quickly by leveraging navigation meshes (or navmesh). A navmesh is a type of data structure that allows us to do quick and efficient calculations such as pathfinding, line of sight, slope, etc. Given any location on the planet the user wants to analyze, we merge geospatial datasets into one large navmesh. Once the navmesh is made, we use a pathfinding algorithm (customized A*) in order to optimize a route amongst many variables. This algorithm looks at all neighboring tiles and calculates the cost for each one. This cost is a customized heuristic that takes into consideration slope, corridor width, land cover, if the tile has a road, and how far that tile takes you from the goal. This cost is then assigned to all neighbors and the lowest cost is chosen. For example, a tile with a road on it will have lower cost then one that has a steep slope on it. The following image depicts a simplified example.
What’s Next
We're building our product roadmap based on direct feedback from Washington Army National Guard soldiers who tested our solution in the field yesterday, as well as insights from upcoming field exercises with XVIII Airborne Corps units.
We're also excited to announce that Dan Nord, former Chief Product Officer at Maxar Technologies, has joined as our newest advisor. At Maxar, the global leader in earth intelligence, Dan spearheaded product and technology modernization efforts, including the development of their SaaS model, 3D earth simulation suite, and One World Terrain program. Dan will help Exia forge strategic partnerships to integrate new sensors, data sources, and analytics capabilities into our platform.